ITRS 与 GCRS 之间的坐标转换
1. ITRS 与 GCRS 之间的坐标转换
由于地球自转, 地球坐标系并不是一个惯性坐标系, 而轨道计算是建立在牛顿力学的基础上的, 因此定轨工作不能在地球坐标系中进行。如前所述, GCRS 是一个相当不错的准惯性坐标系, 定轨工作一般都在该坐标系中进行,但是用户利用卫星导航定位系统最终是为了求得在地球坐标系中的位置和速度, 因而还必须把 GCRS 中所求得的卫星轨道(卫星位置和速度) 转换到地球坐标系 ITRS(WGS 84) 中去。
ITRS 与 GCRS 之间有下列转换关系:
(
X
Y
Z
)
G
C
R
S
=
[
P
]
[
N
]
[
R
]
[
W
]
(
X
Y
Z
)
I
T
R
S
\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{\mathrm{GCRS}}=[\boldsymbol{P}][\boldsymbol{N}][\boldsymbol{R}][\boldsymbol{W}]\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{\mathrm{ITRS}}
⎝
⎛XYZ⎠
⎞GCRS=[P][N][R][W]⎝
⎛XYZ⎠
⎞ITRS
(
X
Y
Z
)
ITRS
=
[
W
]
−
1
[
R
]
−
1
[
N
]
−
1
[
P
]
−
1
(
X
Y
Z
)
G
C
R
S
\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{\text {ITRS }}=[\boldsymbol{W}]^{-1}[\boldsymbol{R}]^{-1}[\boldsymbol{N}]^{-1}[\boldsymbol{P}]^{-1}\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)_{\mathrm{GCRS}}
⎝
⎛XYZ⎠
⎞ITRS =[W]−1[R]−1[N]−1[P]−1⎝
⎛XYZ⎠
⎞GCRS
式中,
[
P
]
[\boldsymbol{P}]
[P] 为岁差矩阵;
[
N
]
[\boldsymbol{N}]
[N] 为章动矩阵;
[
R
]
[\boldsymbol{R}]
[R] 为地球自转矩阵;
[
W
]
[\boldsymbol{W}]
[W] 为极移矩阵。 考虑到 IGS 已完成了坐标转换工作, 在精密星历中直接给出了卫星质心在 ITRS 中的位置和速度, 而广播星历的精度有限, 允许采用一些近似的转换方法, 因此在下面的坐标转换中, 我们仍采用经典的转换方法与术语 (与 IS-GPS-200D 及 IS-GPS-705 中给出的方法基本 一致)。高精度的严格方法可参阅 IAU 的决议文件和空间大地测量学等参考资料。
(1)把 GCRS 转换至观测时刻
t
i
t_i
ti 的平天球坐标系
我们知道, GCRS 是参考时刻
t
0
=
J
2000.0
t_0=\mathrm{J} 2000.0
t0=J2000.0 时的平天球坐标系, 要把它转换为观测时刻
t
i
t_i
ti 时的平天球坐标系, 只要考虑
[
t
0
−
t
i
]
\left[t_0-t_i\right]
[t0−ti] 时间段内的岁差改正, 即乘上
[
P
]
−
1
[\boldsymbol{P}]^{-1}
[P]−1 矩阵即可。
(2)把
t
i
t_i
ti 时的平天球坐标系转换为同一时刻的真天球坐标系
要把观测时刻
t
i
t_i
ti 时的平天球坐标系转换为真天球坐标系, 只需顾及该时刻的章动, 即只需乘上
[
N
]
−
1
[\boldsymbol{N}]^{-1}
[N]−1 矩阵即可。
(3)把
t
i
t_i
ti 时的真天球坐标系转换为同一时刻的真地球坐标系
我们知道, 真天球坐标系
X
X
X 轴是指向该时刻的真春分点
γ
\gamma
γ 的,而真地球坐标系的
X
X
X 轴 是指向起始子午线与赤道的交点,两者之间的夹角称为格林尼治真恒星时 GAST 。其计算 公式如下:
GAST
=
36
0
∘
2
4
h
(
U
T
1
+
6
h
41
m
50.54841
s
+
8640184.812866
s
⋅
t
+
0.093104
s
⋅
t
2
−
6.2
s
×
1
0
−
6
⋅
t
3
)
+
Δ
Ψ
cos
(
ε
ˉ
+
Δ
ε
)
\begin{aligned} \text { GAST }=& \frac{360^{\circ}}{24^{\mathrm{h}}}\left(\mathrm{UT} 1+6 \mathrm{~h} 41 \mathrm{~m} 50.54841 \mathrm{~s}+8640184.812866 \mathrm{~s} \cdot \mathrm{t}+0.093104 \mathrm{~s} \cdot t^2\right.\\ &\left.-6.2 \mathrm{~s} \times 10^{-6} \cdot t^3\right)+\Delta \Psi_{\cos }(\bar{\varepsilon}+\Delta \varepsilon) \end{aligned}
GAST =24h360∘(UT1+6 h41 m50.54841 s+8640184.812866 s⋅t+0.093104 s⋅t2−6.2 s×10−6⋅t3)+ΔΨcos(εˉ+Δε)
式中,
t
t
t 为离
J
2000.0
\mathrm{J} 2000.0
J2000.0 的儒略世纪数;
ε
ˉ
\bar{\varepsilon}
εˉ 为仅顾及岁差时的黄赤交角,
ε
ˉ
=
2
3
∘
2
6
′
21.44
8
′
′
−
\bar{\varepsilon}=23^{\circ} 26^{\prime} 21.448^{\prime \prime}-
εˉ=23∘26′21.448′′−
46.81
5
′
′
⋅
t
−
0.0005
9
′
′
⋅
t
2
+
0.00181
3
′
′
⋅
t
3
;
Δ
ψ
46.815^{\prime \prime} \cdot t-0.00059^{\prime \prime} \cdot t^2+0.001813^{\prime \prime} \cdot t^3 ; \Delta \psi
46.815′′⋅t−0.00059′′⋅t2+0.001813′′⋅t3;Δψ
46.81
5
′
′
⋅
t
−
0.0005
9
′
′
⋅
t
2
+
0.00181
3
′
′
⋅
t
3
;
Δ
Ψ
46.815^{\prime \prime} \cdot t-0.00059^{\prime \prime} \cdot t^2+0.001813^{\prime \prime} \cdot t^3 ; \Delta \Psi
46.815′′⋅t−0.00059′′⋅t2+0.001813′′⋅t3;ΔΨ为黄经章动;
Δ
ε
\Delta \varepsilon
Δε 为交角章动;
U
T
1
\mathrm{UT1}
UT1 则可据观测时的 UTC 和( UTC-UT1) 值求得。
把真天球坐标系绕
Z
Z
Z 轴旋转 GAST 角后就能转换到真地球坐标系, 旋转矩阵
R
\boldsymbol{R}
R 为:
R
=
(
cos
G
A
S
T
sinGAST
0
−
sinGAST
cos
G
A
S
T
0
0
0
1
)
\boldsymbol{R}=\left(\begin{array}{ccc} \cos G A S T & \operatorname{sinGAST} & 0 \\ -\operatorname{sinGAST} & \cos G A S T & 0 \\ 0 & 0 & 1 \end{array}\right)
R=⎝
⎛cosGAST−sinGAST0sinGASTcosGAST0001⎠
⎞
(4)把
t
i
t_i
ti 时的真地球坐标系转换为 ITRS (WGS 84)
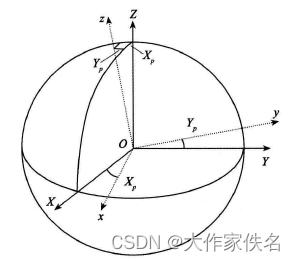
从上图可以看出, 只需要将 t i t_i ti 时的真地 球坐标系绕 y y y 轴旋转 ( − X p ) \left(-X_p\right) (−Xp) 角后,然后再绕 x x x 轴旋转 ( − Y p ) \left(-Y_p\right) (−Yp) 角后, 就可以把直地球坐标 系 O − x y z O-x y z O−xyz 转换为 ITRS ( W G S 84 ) \operatorname{ITRS}(\mathrm{WGS} 84) ITRS(WGS84) 坐标系 O − X Y Z 。 O-X Y Z_{\text {。 }} O−XYZ。 即
(
X
Y
Z
)
=
R
x
(
−
Y
p
)
R
y
(
−
X
p
)
(
x
y
z
)
=
(
1
0
0
0
cos
Y
p
−
sin
Y
p
0
sin
Y
p
cos
Y
p
)
(
cos
X
p
0
sin
X
p
0
1
0
−
sin
X
p
0
cos
X
p
)
(
x
y
z
)
\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)=\boldsymbol{R}_x\left(-Y_p\right) \boldsymbol{R}_y\left(-X_p\right)\left(\begin{array}{l} x \\ y \\ z \end{array}\right)=\left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos Y_p & -\sin Y_p \\ 0 & \sin Y_p & \cos Y_p \end{array}\right)\left(\begin{array}{ccc} \cos X_p & 0 & \sin X_p \\ 0 & 1 & 0 \\ -\sin X_p & 0 & \cos X_p \end{array}\right)\left(\begin{array}{l} x \\ y \\ z \end{array}\right)
⎝
⎛XYZ⎠
⎞=Rx(−Yp)Ry(−Xp)⎝
⎛xyz⎠
⎞=⎝
⎛1000cosYpsinYp0−sinYpcosYp⎠
⎞⎝
⎛cosXp0−sinXp010sinXp0cosXp⎠
⎞⎝
⎛xyz⎠
⎞
由于极移值
X
p
X_p
Xp 和
Y
p
Y_p
Yp 都是小于
0.
5
′
′
0.5^{\prime \prime}
0.5′′ 的微小值, 所以
cos
X
p
=
cos
Y
p
=
1
,
sin
X
p
=
X
p
\cos X_p=\cos Y_p=1, \sin X_p=X_p
cosXp=cosYp=1,sinXp=Xp,
sin
Y
p
=
Y
p
\sin Y_p=Y_p
sinYp=Yp, 于是有
:
:
:
(
X
Y
Z
)
=
(
1
0
0
0
1
−
Y
p
0
Y
p
1
)
(
1
0
X
p
0
1
0
−
X
p
0
1
)
(
x
y
z
)
=
(
1
0
X
p
0
1
−
Y
p
−
X
p
Y
p
1
)
(
x
y
z
)
=
[
W
]
(
x
y
z
)
\left(\begin{array}{l} X \\ Y \\ Z \end{array}\right)=\left(\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & -Y_p \\ 0 & Y_p & 1 \end{array}\right)\left(\begin{array}{ccc} 1 & 0 & X_p \\ 0 & 1 & 0 \\ -X_p & 0 & 1 \end{array}\right)\left(\begin{array}{l} x \\ y \\ z \end{array}\right)=\left(\begin{array}{ccc} 1 & 0 & X_p \\ 0 & 1 & -Y_p \\ -X_p & Y_p & 1 \end{array}\right)\left(\begin{array}{l} x \\ y \\ z \end{array}\right)=[\boldsymbol{W}]\left(\begin{array}{l} x \\ y \\ z \end{array}\right)
⎝
⎛XYZ⎠
⎞=⎝
⎛10001Yp0−Yp1⎠
⎞⎝
⎛10−Xp010Xp01⎠
⎞⎝
⎛xyz⎠
⎞=⎝
⎛10−Xp01YpXp−Yp1⎠
⎞⎝
⎛xyz⎠
⎞=[W]⎝
⎛xyz⎠
⎞
出自:《GPS测量与数据处理》第二章。