基于Matlab模拟、检测和跟踪飞机着陆进场中异常的仿真(附源码)
该示例显示了如何自动检测最终接近机场跑道的飞机的偏差和异常。在此示例中,将对理想的着陆接近轨迹进行建模,并从中生成变体,模拟雷达轨迹,并在轨迹偏离安全着陆规则时立即发出警告。
一、介绍
着陆是飞行中安全的关键阶段。飞机在最后接近着陆时必须与跑道对齐,逐渐下降到地面,并降低其地面速度,同时使其安全地保持在失速速度之上。所有这些步骤都是为了确保飞机轻轻接触地面,以减少对乘客的风险,并避免对飞机或跑道造成物理损坏。这些规则可以很容易地由航空专业人员定义,或者可以使用机器学习从跟踪数据中推断出来。在此示例中,假设已定义规则。
主要机场通常有多个朝向不同方向的跑道。接近的飞机由机场塔楼的空中交通管制员引导,降落在当时与风向最对齐的跑道之一上。在进近过程中,控制器根据跟踪系统监控飞机。过去几十年来,机场交通量有所增加,随之而来的是空中交通管制员的工作量也随之增加。因此,需要自动可靠地提醒空中交通管制员注意以不安全的方式接近着陆点的飞机:与跑道对齐不畅,下降太快或太慢,或接近太快或太慢。
二、生成和标记轨迹
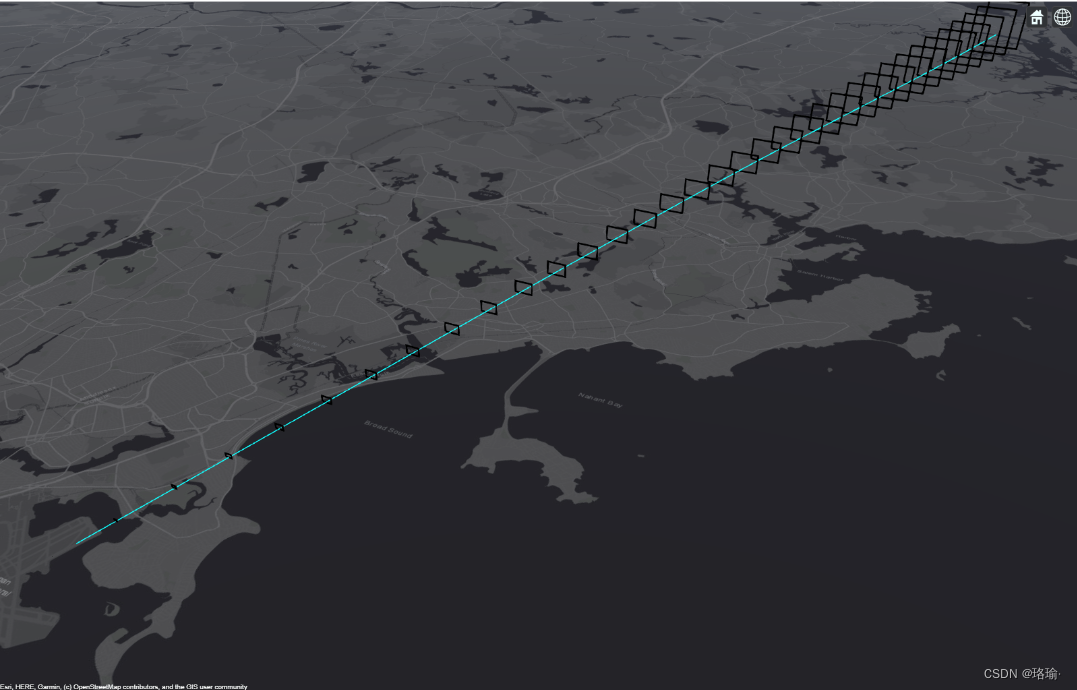
可以使用对象定义进入马萨诸塞州波士顿洛根国际机场的着陆路径轨迹。轨迹航点与从东北向西南延伸的22L跑道对齐,滑行坡度为3度。确定到达时间和爬升率,以将接近的飞机减慢到安全的速度和平稳的着陆。请注意,爬升速率的正值用于下降轨迹。可以在地图上可视化轨迹。
为了使降落在洛根机场22L跑道上的轨迹是安全的,轨迹必须满足以下规则:
-
轨迹必须与跑道方向紧密对齐。
-
在最后20963米内,滑行坡度必须在2.5到4度之间。在20963米以上的距离,高度必须至少为3000英尺。
-
着陆点的速度必须在120节到180节之间。速度上限可以随着与着陆点的距离线性增加。
使用对象函数定义基线轨迹周围的正态分布。轨迹中的每个航点都受到零均值正态分布和标准差的扰动,该标准差从第一个航点到最后一个航点(着陆点)变小。在第一个航点,标准偏差在经度上为5e-3度,在高度上为300米。标准差在经度上减小到 1e-3 度,在中点处降低到高度 150 米,然后在地面终点处降低到经度的 1e-4 度和高度为 0。
要创建 20 条受基线轨迹扰动的轨迹,请先是轨迹,然后再创建轨迹。要查看哪些扰动轨迹满足安全着陆方法的规则 。如果从中采样的点至少有 1% 违反任何轨迹规则,则该函数将轨迹声明为异常轨迹。
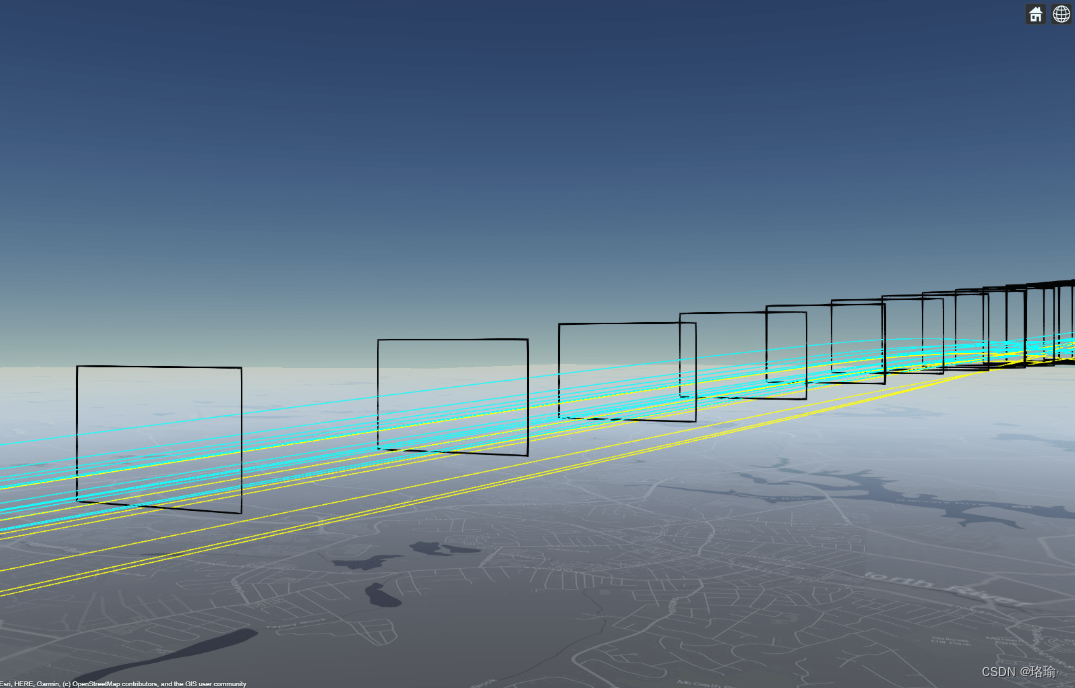
对于异常轨迹,以黄色绘制轨迹,对于安全方法,以青色绘制轨迹。总体而言,在生成的 20 个轨迹中,有 7 个异常轨迹。
三、定义方案
由于多种原因,根据跟踪数据实时检测异常是一项挑战。首先,由于跟踪数据不完善,噪声不完善,跟踪结果不确定。因此,必须提供一些公差以避免发出错误警告。其次,传感器报告错误检测,跟踪系统必须小心不要根据这些错误检测确认跟踪。仔细确认需要跟踪系统花费更多时间来确认跟踪。为避免在错误轨道上出现过多警告,请仅在确认轨道后发出警告。
定义以地球为中心的追踪方案。
计划在机场接近降落的飞机是为了避免一架飞机在随后的飞机上产生空气动力学影响。两架飞机之间的最小安全时差为一分钟。
可以再次使用对象函数来扰动每个轨迹,并确保没有额外的扰动应用于 。然后将每个轨迹附加到新平台。若要扰乱整个方案,请使用对象函数。
与美国其他主要机场一样,洛根使用机场表面检测设备 - X型(ASDE-X)在最终进近和地面上跟踪飞机。ASDE-X依靠机场监视雷达,来自接近飞机的自动相关监视广播(ADS-B)报告以及其他方法来提供每秒更新的准确跟踪。
为了简化此跟踪系统的模型,请使用连接到机场塔架的统计雷达模型,并将传感器连接到对象。通过确认轨道是否收到 5 个更新中的 4 个,可以将跟踪器配置为在确认跟踪器时保持保守。
四、运行方案并检测异常轨道
下面,将模拟场景并跟踪接近的飞机。可以使用帮助程序函数为磁道生成异常警告。
违反安全进近规则的轨道显示为黄色,而遵循这些规则的轨道以青色显示。请注意,当曲目违反任何规则时,将立即发出警告,并在轨道满足所有规则时将其删除。
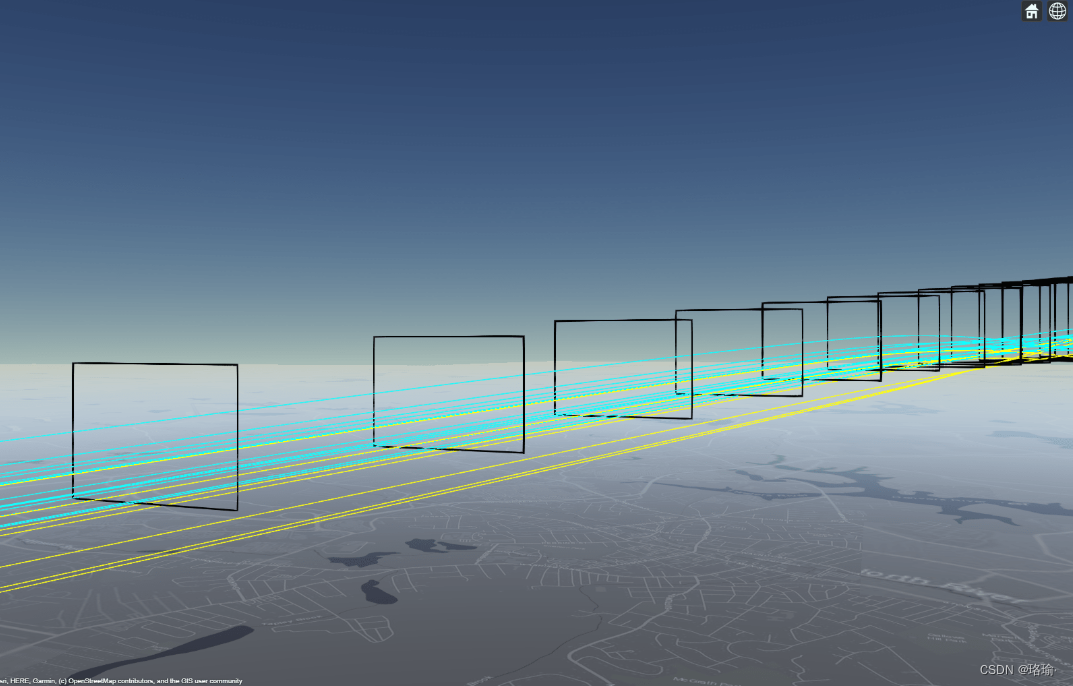
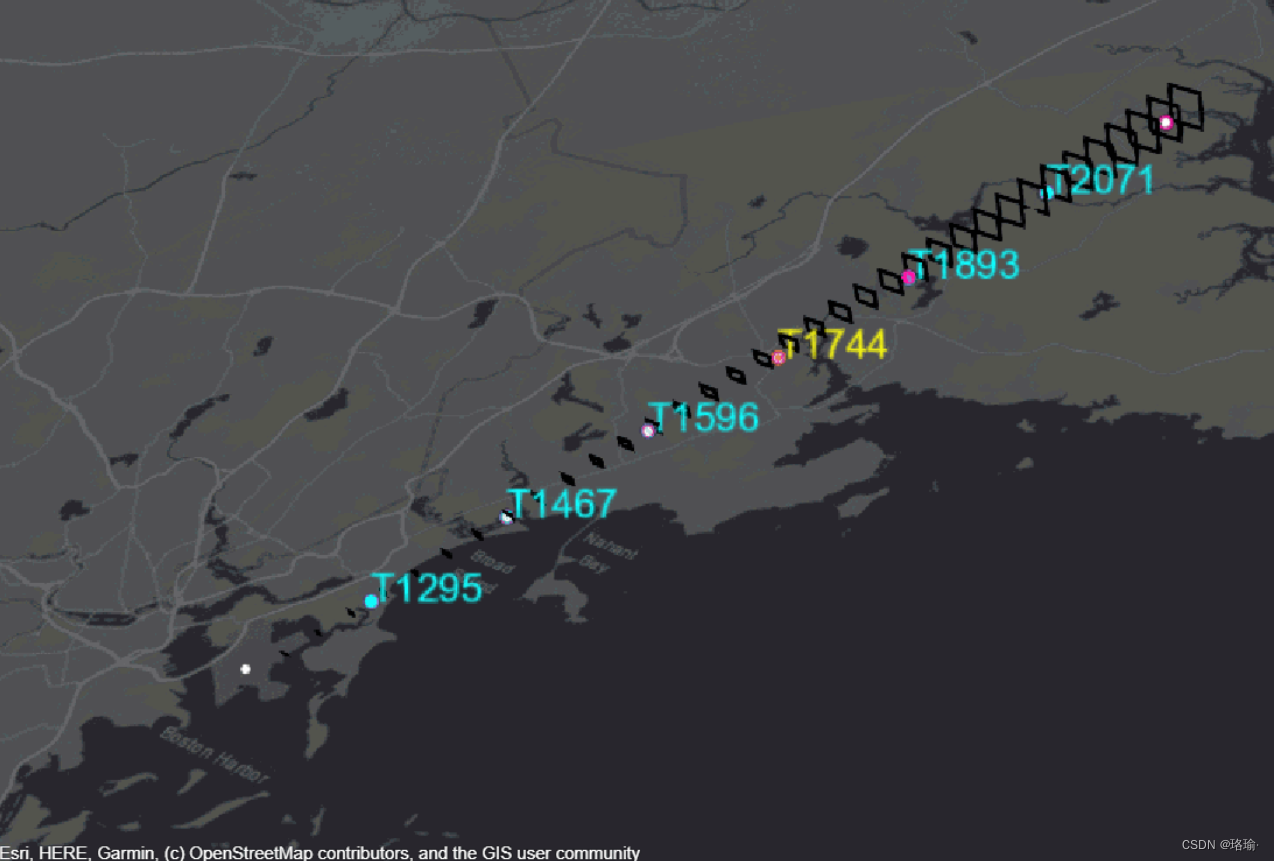
下图是在从900秒到960秒进行一分钟模拟时拍摄的。它以青色显示标识为安全的轨迹,以黄色显示标识为异常的轨迹。这种识别在每个模拟步骤中都完成,如1893轨道所示。
五、将跟踪异常报告与事实进行比较
该函数使用在模拟期间收集的,并将其与每个轨迹的计算结果进行比较。与真值类似,如果轨道被声明为异常,则至少为 1% 的时间步长分配异常标志。可以看到,对于发现异常的七个轨迹,已正确发出异常。
六、总结
在此示例中,学习了如何使用跟踪数据针对异常情况(如不安全的着陆方法)生成实时警告。
在地理坐标中定义了理想的着陆接近轨迹。然后,使用并创建了 20 条偏离理想着陆接近轨迹的轨迹,并在 中一个接一个地计划这些轨迹。要对机场跟踪系统进行建模,使用统计雷达模型(由系统对象)和跟踪器(由系统对象)简化了系统模型。
七、程序
使用matlab R2021a版本,点击打开。
打开下面的“UsingPerturbations...Example.mlx”文件,点击运行,就可以看到上述效果。
关注下面公众号,后台回复关键词:模拟检测跟踪飞机着陆进场仿真,发送源码链接。